
Proyectos públicos
Redes submarinas heterogéneas para exploración colaborativa, dinámica y rentable (NEMO4EX) – Código: PID2023-146540OB-C43
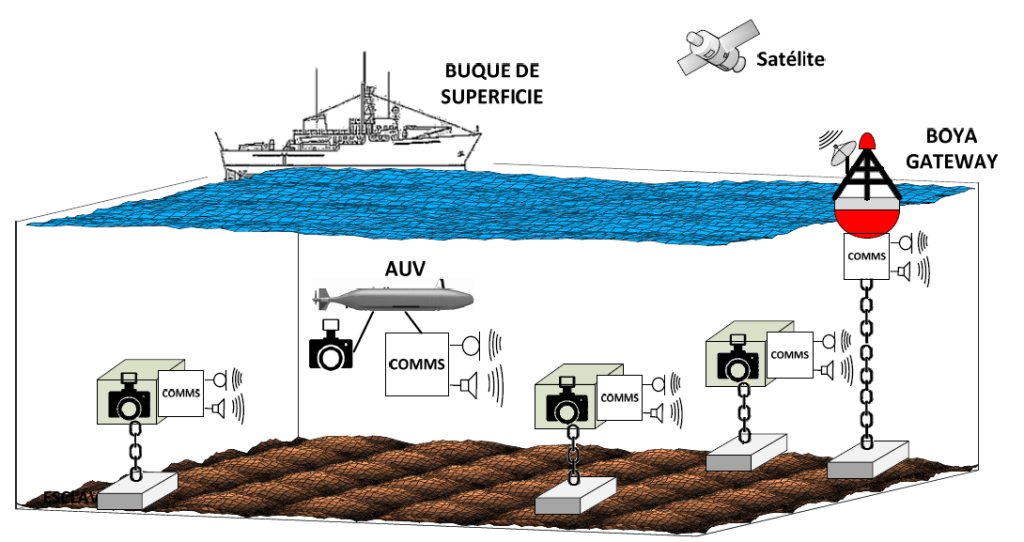
Con el propósito de aumentar el tiempo de servicio de los AUVs y reducir los costes operativos, este proyecto explora el diseño y la construcción de un prototipo para la carga inalámbrica de este tipo de vehículos en entornos marinos.
Basado en la inducción magnética resonante, el proyecto abarca tanto el diseño de bobinas como de convertidores de electrónica de potencia y control.
La caracterización de estos sistemas también se emplea en este proyecto para la planificación de la carga y la ubicación de cargadores.
Financiación: 230.135 €
Entidad financiadora:

Cámara avanzada 3D para captación optimizada de imágenes submarinas y recarga inalámbrica – Código: PCM_00006
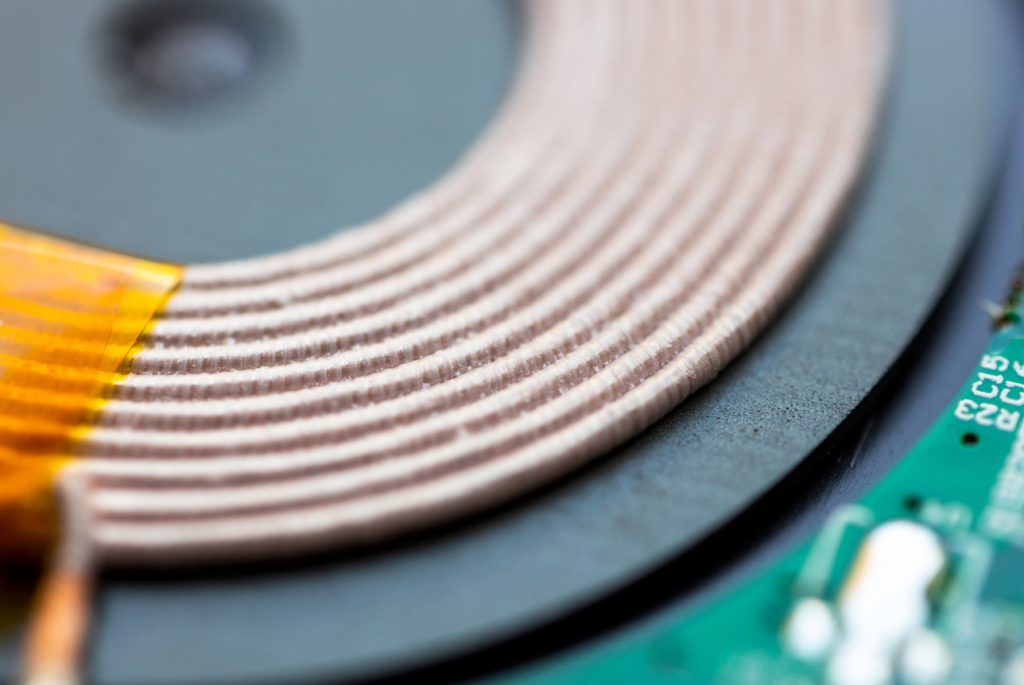
Este Proyecto de Investigación (CAMSUB3D) está enfocado al diseño y fabricación industrial de una cámara 3D ligera y computacionalmente eficiente, que obtenga imágenes de alta calidad con información de distancia o RGBD (Red, Green, Blue, Distance) en entorno submarino. Se usará un procedimiento novedoso mediante el cual la batería de la cámara se podrá cargar cuando está sumergida sin la utilización de cables que la conecten a la fuente transmisora. Para ello, una bobina inductora realizará la carga en proximidad a la bobina receptora de la cámara con un sistema de transferencia de potencia WPT (Wireless Power Transfer).
Financiación: 232.530 €
Entidad financiadora:
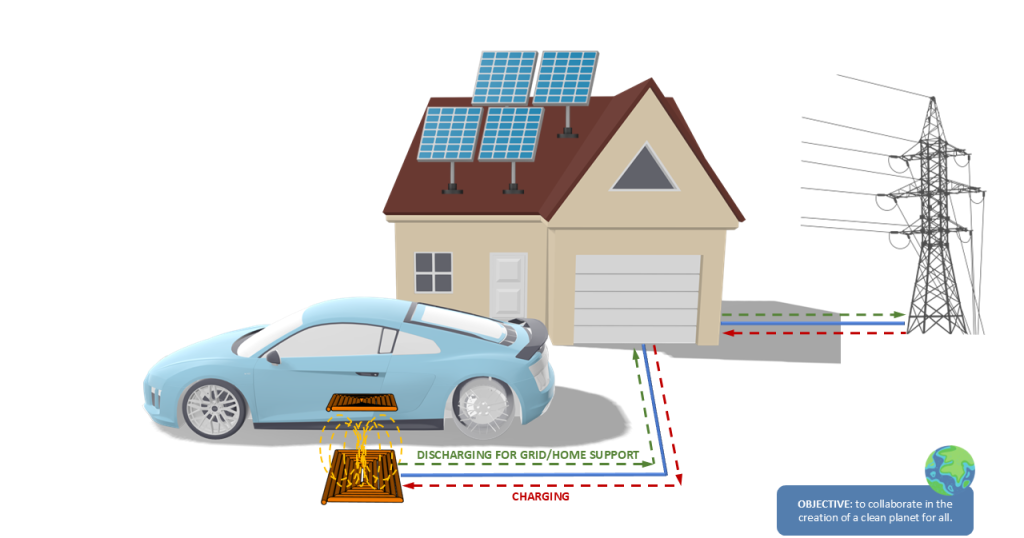
Carga avanzada para coches eléctricos: sin cables y con control coordinado para operaciones V2G realistas (B-MOVING) – Código: PID2019-11053-RA-I00
El objetivo del proyecto fue obtener dos prototipos de cargador inalámbrico para vehículos eléctricos (VE) con funcionalidades avanzadas que hicieran factible la realización de operaciones V2G (Vehicle-to-Grid) de manera coordinada con otros vehículos eléctricos.
Los prototipos implementaron tres funcionalidades avanzadas con respecto a otros desarrollos realizados por equipos de investigación. El primer avance consistió en la implementación efectiva de la transferencia bidireccional de potencia, permitiendo las cuatro combinaciones posibles de potencia activa y reactiva con el cargador conectado a la red eléctrica, con el fin de ofrecer servicios V2G como la regulación de frecuencia y tensión.
Por otro lado, el segundo avance significativo se centró en el soporte a la sincronización de la señal entregada con la red eléctrica.
Los prototipos buscaron ser no solo un ejemplo funcional de transferencia inalámbrica bidireccional, sino también una demostración de la viabilidad de incluir control V2G en estos sistemas, constituyendo esta la tercera característica destacada.
Este tercer avance se basó en la definición, diseño e implementación de estrategias de operación para un conjunto de cargadores capaces de funcionar tanto con carga estática como inalámbrica, contemplando en este último caso escenarios de carga estática, estacionaria y dinámica.
La estrategia de operación siguió un enfoque predictivo y distribuido, basado en modelos realistas de degradación de baterías. Gracias a la predicción, se mejoraron las prestaciones en términos de operación de la red y los beneficios económicos para los usuarios. En cuanto al carácter distribuido y coordinado de la estrategia, se logró reducir el intercambio de datos entre los vehículos y el servidor, mitigando así una de las principales amenazas de seguridad presentes en las propuestas centralizadas.
Entidad financiadora:
i-STENTORE: innovative energy Storage TEchNologies TOwards increased Renewables integration and Efficient operation
Entidad financiadora:

